Пользователь
Пользователь
- Статус
- Оффлайн
- Регистрация
- 20 Мар 2020
- Сообщения
- 166
- Реакции
- 41
Вопрос в шапке. Надеюсь что найдётся добрый дядя который разжуёт мне моё говно и покормит с ложки.
Посмотреть вложение 230299
Гдз математика 5 кла$$ виленкин:
/*
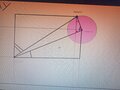
* g_ctx.globals.eye_pos - точка B
* center - точка A
* Угол A = 90 градусов
* Нужно найти координаты C
*/
float_t adjacent_leg = g_ctx.globals.eye_pos.DistTo2D(center); // катет 1
float_t opposite_leg = bbox->radius * scale; // катет 2
float_t tangent = opposite_leg / adjacent_leg; // тангенс угла B
float_t point_yaw = RAD2DEG(atan(tangent)); // угол B
float_t point_distance = sqrt((adjacent_leg * adjacent_leg) + (opposite_leg * opposite_leg)); //гипотенуза